
Facilities
Computing
Orion is a Dell/EMC PowerEdge C6420 cluster comprising 1,800 compute-nodes with dual 20-core Xeon Gold 6148 processors 2.4 GHz and 345TB of RAM. Eight nodes are fat nodes with 384GB RAM, the remaining with 192GB RAM. Each node is interconnected via Mellanox HDR100 InfiniBand. Orion has a peak performance of nearly 5.5 petaFLOPS.
Shadow is a Cray CS300-LC cluster with 4800 Intel Ivy Bridge processor cores and 28,800 Intel Xeon Phi cores. Each node has either 512GB RAM (45%), 128GB RAM (45%) or 64GB RAM (10%) for a system total of 70TB RAM. Moreover, each node is interconnected via FDR InfiniBand. Shadow has a peak performance of 593 teraFLOPS.
Scout is a Dell C8220 cluster comprising 160 Dell nodes with 16 2x Xeon cores (E5-2680 2.7GHz, turbo, 3.5GHz, eight core Sandy Bridge processors) and 32 GB of memory totaling 5 TB system RAM. Each node is interconnected via FDR InfiniBand. The system has eight nodes with 1 Nvidia K20 GPU.
Orion, Shadow, and Scout are maintained by the High-Performance Computing Collaboratory (HPC2) at the Mississippi State University (MSU) (https://www.hpc.msstate.edu/).
The Department of Electrical and Computer Engineering (ECE) also has four small clusters we use for initial scale testing before porting the code onto HPC2 machines. The PIs utilize three standard devices: (a) Dak: Dual 12-core Intel Xeon Silver 4116 processor with 128GB RAM per processor. The machine has 3 NVIDIA Titan RTX cards. Each card has 576 multi-precision Turin Tensor Cores, providing up to 130 teraflops of deep learning performance. The device has 24GB of GDDR6 memory with 672GBps bandwidth. The machine storage comprises 2TB RAID, 2TB SSD, and an external ISCSI connected to an additional 20TB of space; (b) Velocity-1: Dual 6-core Intel Xeon X5670 processor with 144GB RAM per processor. The machine has 5 NVIDIA Tesla C2050 cards. Each card has 448 CUDA cores and 3GB of memory with 144GBps bandwidth. The machine storage is 1TB SSD for OS, a 2TB drive, and a 10TB drive for storage; (c) DL01: Dual 8-core Intel Xeon E5-2609 processor with 32GB RAM. The machine has 4 NVIDIA GeForce GTX 1080 Ti cards. Each card has 3584 CUDA cores with 11GB of GDDR5X memory, allowing 484GBps bandwidth. The machine storage is 1TB SSD; and (d) Velocity-2: Dual 18 core Intel Xeon E5-2697v4 processor with 896GB RAM per processor. The machine has 7 Tesla K80 cards. Each card has 4992 CUDA cores and 24GB of GDDR5 RAM with 5GBps bandwidth. The machine storage is 1TB SSD for OS and 6TB for data.
Vehicular Platforms
The Center for Advanced Vehicular Systems (CAVS) has three drive-by-wire and autonomy-capable vehicles for data collection and testing on the 55-acre CAVS proving ground (dirt roads, pavements, urban setting, rural areas, bridges, with roadside units, dense wireless connectivity, sporadic connectivity): (a) Polaris MRZR; (b) Clearpath Warthog robot; and (c) Lite Trax MuddTrax MTX-C tracked off-road vehicle. The Polaris MRZR provides a military-relevant high-speed, high-mobility wheeled autonomous ground vehicle. The Clearpath Warthog is an ATV-sized skid-steer UGV designed for autonomous ground vehicle research and development. The Lite Trax MTX-C is a large amphibious vehicle that uses tracks to maintain mobility in soft-soil conditions.
Each vehicle is equipped with customizable data collection and autonomous system hardware built on NVIDIA data processing hardware (NVIDIA DRIVE AGX Pegasus and NVIDIA DRIVE PX2 systems) and a selection of sensors, including Ouster OS1 64-beam LIDAR units, Sekonix RGGB cameras (60 FOV and 120 FOV), Swiftnav DURO GPS and IMU, and Ainstein automotive radar units. Custom-built enclosures allow data collection and vehicle testing in adverse weather conditions.
AERPAW Platform
MSU is home to the NSF Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) testbed, which is an at-scale aerial wireless experimentation platform designed to integrate drones into the national airspace and to enable new advanced wireless features for these platforms, such as flying base stations for hot spot wireless connectivity. AERPAW will develop a software-defined, reproducible, and open-access advanced wireless platform with experimentation features spanning 5G technologies and beyond. Controlled laboratory and outdoor experiments are enabled with several Universal Software Radio Peripherals (USRPs): three Ettus Resea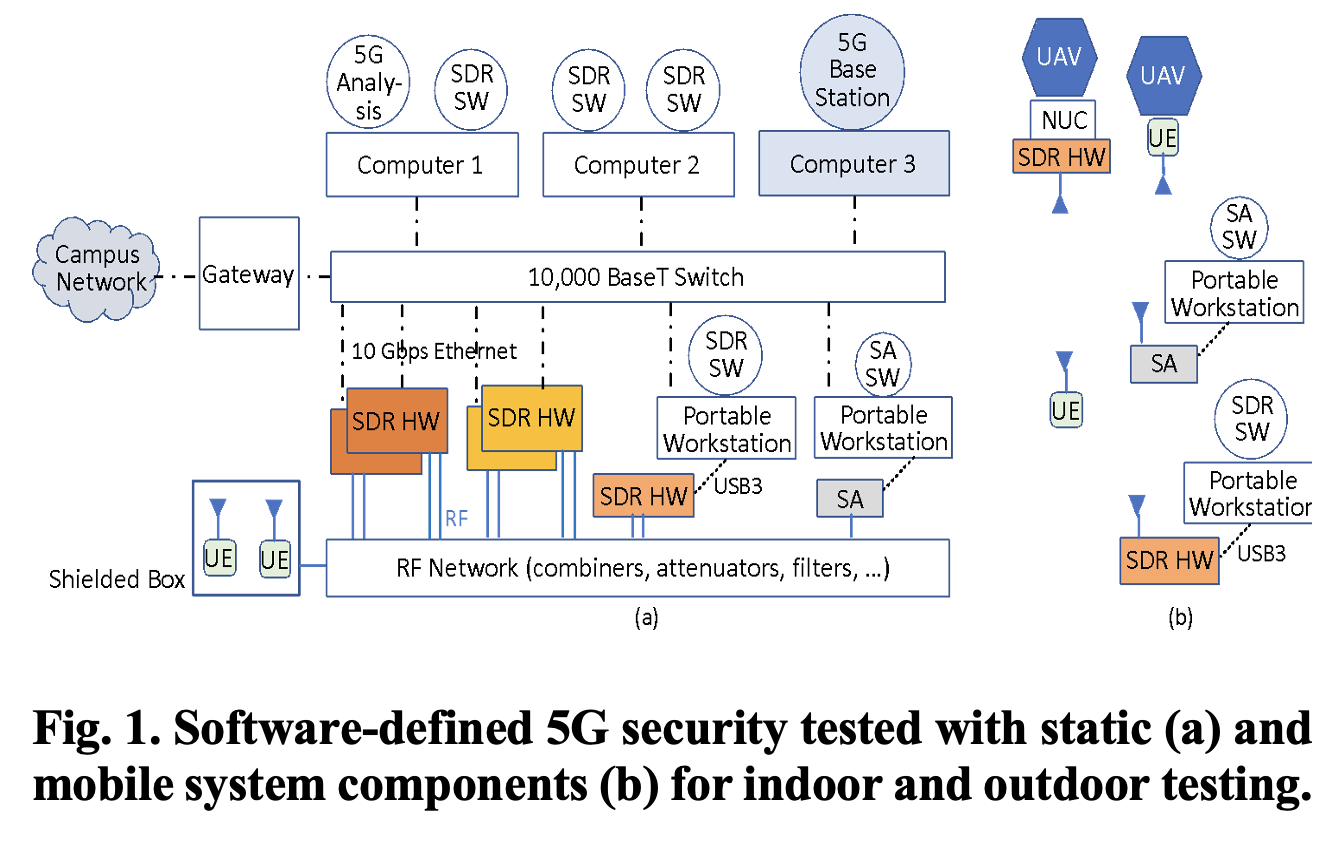 rch N310, eight X310s with two UBX160 daughterboards each, three B210, four E312, and two B205mini. Several powerful workstations of various form factors for fixed and mobile Software-Defined Radio (SDR) nodes, as well as RF processing components and antennas are available in the lab. Experiments can be done in an RF cable network setup, over the air in the Faraday cage, or the air without RF shielding, subject to FCC licensing rules. The available software includes SDR and other open-source software, such as GNU Radio, LiquidDSP, srsRAN, Open Air Interface (OAI), command line and GUI software development tools, and compilers. The researchers can access commercial software licenses for generating and analyzing 4G and 5G signals. Specifically, MSU is developing a modern “Software-Defined 5G Security Testbed,” which allows generating 5G signals with the 5G base station “CallBoxPro” from Amarisoft and analyzing it with Sanjole’s/Keysight’s Wavejudge 5G signal analysis software (Fig. 1). The testbed enables generating clean signals for different modes of 5G operation with different SNRs, number of users, resource allocation, etc., as well as capturing the downlink and uplink frames over the air with the ground and airborne SDRs, which are part of the testbed. As part of MSU’s design, development, and testing efforts for the NSF platform AERPAW (Aerial Experimentation and Research Platform for Advanced Wireless), portable ground SDR systems, including servers, workstations, and small-form-factor computers, RF chains, and antenna systems, batteries and fuel-generators are available for ad hoc field testing. Wireless experiments at 28 GHz are being developed for mm-wave front ends to be integrated into AERPAW’s fixed and mobile nodes. MSU faculty can also access statistical packages such as Matlab with several toolboxes, including the 5G toolbox.
rch N310, eight X310s with two UBX160 daughterboards each, three B210, four E312, and two B205mini. Several powerful workstations of various form factors for fixed and mobile Software-Defined Radio (SDR) nodes, as well as RF processing components and antennas are available in the lab. Experiments can be done in an RF cable network setup, over the air in the Faraday cage, or the air without RF shielding, subject to FCC licensing rules. The available software includes SDR and other open-source software, such as GNU Radio, LiquidDSP, srsRAN, Open Air Interface (OAI), command line and GUI software development tools, and compilers. The researchers can access commercial software licenses for generating and analyzing 4G and 5G signals. Specifically, MSU is developing a modern “Software-Defined 5G Security Testbed,” which allows generating 5G signals with the 5G base station “CallBoxPro” from Amarisoft and analyzing it with Sanjole’s/Keysight’s Wavejudge 5G signal analysis software (Fig. 1). The testbed enables generating clean signals for different modes of 5G operation with different SNRs, number of users, resource allocation, etc., as well as capturing the downlink and uplink frames over the air with the ground and airborne SDRs, which are part of the testbed. As part of MSU’s design, development, and testing efforts for the NSF platform AERPAW (Aerial Experimentation and Research Platform for Advanced Wireless), portable ground SDR systems, including servers, workstations, and small-form-factor computers, RF chains, and antenna systems, batteries and fuel-generators are available for ad hoc field testing. Wireless experiments at 28 GHz are being developed for mm-wave front ends to be integrated into AERPAW’s fixed and mobile nodes. MSU faculty can also access statistical packages such as Matlab with several toolboxes, including the 5G toolbox.
Software-Defined Radio and Other “Elastic” Edge Software
MSU is also home to the National Software-Defined 5G Security Testbed. The available software includes SDR and other open-source software, such as GNU Radio, Liquid DSP, srsLTE, Open Air Interface (OAI), Linux, command line, and GUI software development tools and compilers. Assess is available to commercial software licenses for generating and analyzing 4G and 5G signals. Specifically, the testbed allows for generating 4G and 5G signals with srsLTE and the 5G base station “Call Box” from Amarisoft. The testbed enables generating clean signals for different modes of 4G/5G operation with different SNRs, number of users, resource allocation, etc., as well as capturing the downlink and uplink frames over the air with ground and airborne SDRs, which are part of the testbed.
Hardware Radios
The ECE Department has commercial 4G LTE smartphones, programmable test SIM cards, and 4G small cells available for research. We will use them to benchmark our proposed scalability, adaptability, and flexibility work.
RF Hardware Laboratory
The ECE department has well-equipped laboratories in the Simrall Engineering building to develop and test radio-frequency (RF) hardware. There is RF test equipment, including signal generators, spectrum analyzers, and network analyzers, as well as a walkable Faraday cage and an anechoic chamber of the following dimensions: W = 16’, H = 14’, L = 26’ (Fig. 2). Soldering stations suitable for work with surface-mount components, RF cables, attenuators, splitters/combiners, directional couplers, and other miscellaneous hardware, as well as design and simulation software for circuits and printed-circuit boards are also available.
Ground and Aerial Platforms
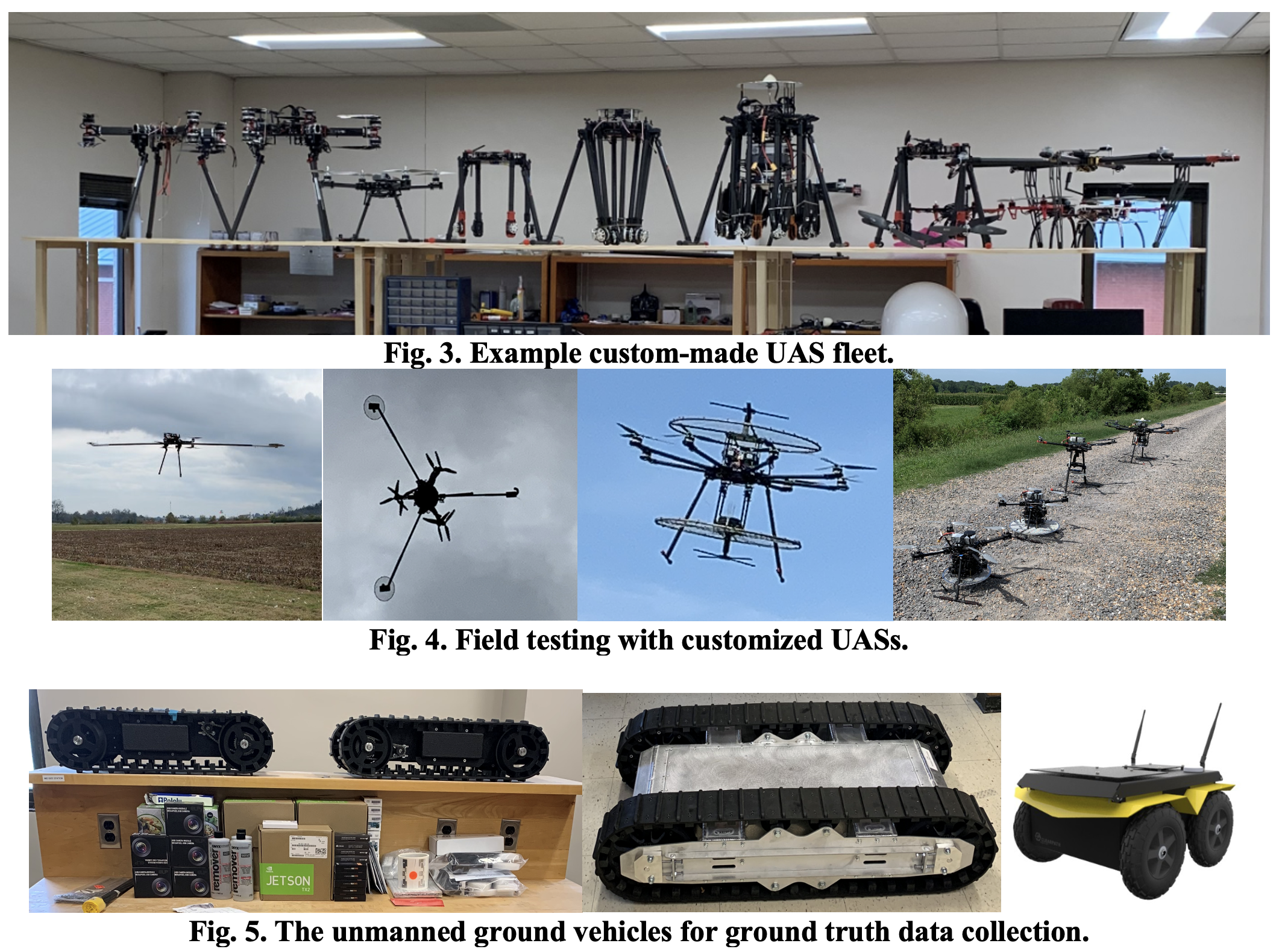
The ECE Department has built over 10 custom-built unmanned aerial systems (UASs) of varying flight durations and payload capacities. Some of the UASs are shown in Fig. 3. These drones were utilized for various field testing as shown in Fig. 4. PI recently acquired unmanned ground vehicles.
- The Clearpath Jackal Unmanned Ground vehicle is a small, fast, entry-level field robotics research platform. It has an onboard computer, GPS and IMU fully integrated with ROS for out-of-the-box autonomous capability.
- The Superdroid The ROS Vision Robot is a programmable autonomous robot built on the Robot Operating System (ROS)
These systems are shown in Fig. 5. All systems can be utilized with a variety of sensors for data collection.
droNE_STation (NEST)
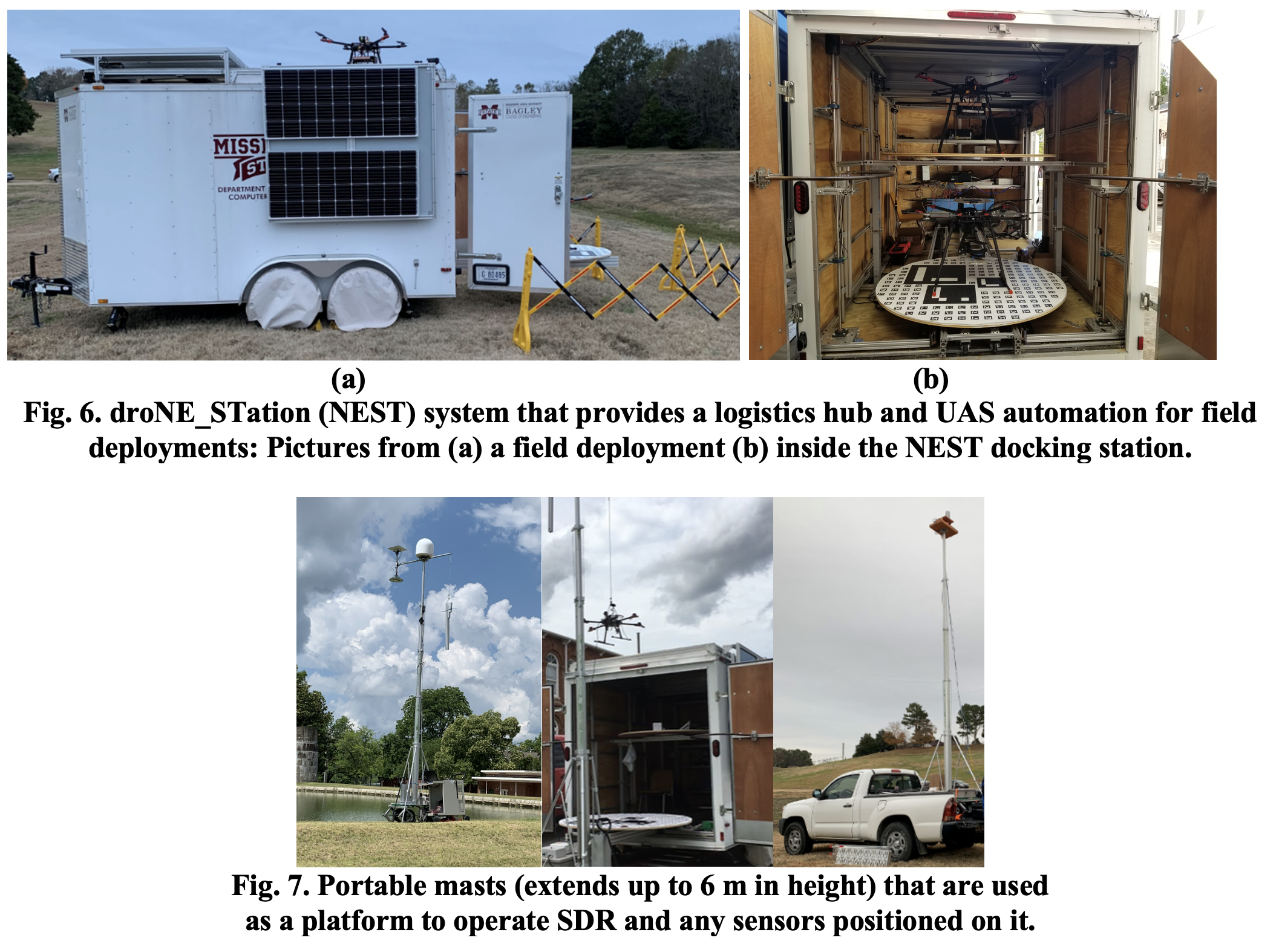
The ECE Department in collaboration with Center for Advanced Vehicular Systems (CAVS – described later) has recently developed a droNE_STation (NEST) to operate drones with indefinite flight operations in an integrated single system as pictured in Fig. 6. The NEST is a self-sustainable (solar powered) fully autonomous mobile trailer platform that consists of two autonomous drones with customized drone sensing modalities and two landing base stations for battery swap and data transfers. Two drones can fly almost continuously and when a drone’s battery is low, the station calls the drone back, lands the drone, and swaps the battery out, with the help of a robotic arm. The data transfer to a master computer takes place in the NEST and the drone then returns to the mission in minutes. The system is designed for a consistent flow of field sensing data (e.g., lidar, radar, thermal, video, etc) for consistently repeatable experiments. In other words, the NEST acts as a logistics hub for drones and possibly other unmanned vehicles in the future. When a vehicle docks, it can dump the data it has gathered onto the NEST’s computer system. This allows the NEST to become a centralized hub for data collection. Users could use a service like SSH to transfer data from the NEST’s onboard computer securely. The ECE Department also owns two portable telescopic masts that can house payloads up to 50 pounds of weight or 6 m in height as depicted in Fig. 7. This system can be used for hanging drones in the air in case of the Federal Aviation Association (FAA) flight restrictions. In addition, the masts can hold experimental antennas or carry RF transceivers, among others.
Raspet Flight Research Laboratory
The Raspet Flight Research Laboratory (RFRL) is headquartered in a state-of-the-art flight research facility located on Bryan Field in Starkville, MS. With over 110,000 square feet of research and hangar space and direct access to Bryan Field’s 6,500’ runway, RFRL is ideally suited to execute end-to-end aviation research, development, test and evaluation from concept innovation through flight test and acceptance. RFRL’s laboratory facilities include extensive ground and flight test instrumentation, measurement equipment, composite fabrication facilities, high- and low-temperature test chambers, fully-equipped avionics, aircraft maintenance, and machine shops, and three UAS hangar bays, two auxiliary hangars, ramp space, and an airfield control tower. RFRL holds FAA authorizations for UAS flights in civil airspace at Bryan Field, Ackerman-Choctaw County Airport, and for over 5,000 square miles in the MS and Arkansas Delta, including the region’s five largest airports [https://www.raspet.msstate.edu/].

Alliance for System Safety of UAS through Research Excellence (ASSURE)
ASSURE encompasses twenty-three of the world’s leading research institutions and over a hundred leading industry and government partners. This FAA Center of Excellence for Unmanned Aircraft Systems (UAS) is led by Mississippi State University and features expertise across a broad spectrum of research areas including air traffic control interoperability, UAS airport ground operations, control, and communications, detection and avoid, human factors, UAS noise reduction, UAS wake signatures, unmanned aircraft pilot training and certification, low altitude operations safety, spectrum management and UAS traffic management [http://www.assureuas.org]. MSU faculty have access to these centers and resources and regularly interact and interact with researchers and staff across centers for defining research programs or collaborating on research projects.
Geosystems Research Institute
The Geosystems Research Institute (GRI) provides capabilities in remote sensing computational technologies, visualization techniques, agriculture, and natural resource management and the transition of these into operational agency research, planning, and decision-support programs. GRI has developed nationally recognized research strengths with strong relationships and inherent respect from state, regional and national agencies and business entities. The GRI management team has recently completed a new strategic plan for the Institute. The plan puts GRI in a clear position to capitalize on its strengths and take full advantage of future opportunities as they arise. With this, GRI is ready to begin advancing the knowledge and technology in earth and its systems, integrating geosystems science and engineering, translating geospatial technologies into useful tools and skills, and transitioning science and technology into practice to support GRI’s stakeholders and improve policy and public awareness. GRI’s Mission is to better understand and predict Earth’s systems and develop geospatial technologies that promote their stewardship, sustainability, and contributions to prosperity. GRI’s Vision is to advance geospatial discovery, knowledge, and education to improve decision-making. [http://www.gri.msstate.edu/]
The Paul B. Jacob High Voltage Laboratory
The Paul B. Jacob High Voltage Laboratory at Mississippi State University serves as an independent, non-industrial university center for high voltage engineering. The laboratory focuses on high voltage research, evaluation, and education. This multi-purpose high voltage facility is designed to meet the evaluation needs of the industry and provides the necessary environment for academic research in high voltage engineering. As an integral part of our national high voltage technology structure, the laboratory serves as a means of strengthening the U.S. position in this specialized technical area. The High Voltage Laboratory was constructed in 1977 and is the largest university-operated high voltage laboratory in North America, enabling full-scale evaluation of large equipment with impulses up to 3000 kV and 1000 kV AC-voltage.

Center for Advanced Vehicular Systems
The Center for Advanced Vehicular Systems (CAVS) is one of the premier university automotive research centers in the world and includes a group of over 300 staff and researchers in addressing some of today’s most pressing challenges. Together with government and industry partners, CAVS is developing solutions to enhance transportation safety, improve vehicle efficiency, increase the productivity of our workforce, and enable a brighter future. CAVS is a strong partner at the state, national, and international levels; with academic partnerships in place across multiple continents, CAVS forms collaborations that help to work smarter, faster, and more efficiently. Through the Institute for Systems Engineering Research (ISER), co-located with the US Army’s Engineering Research and Development Center in Vicksburg, MS, CAVS serves our national interests with expertise in systems engineering and big data management. CAVS Extension arm has a 15-year history of enhancing our state’s manufacturing operations and aiding economic development, and the Institute for Imaging and Analytical Technologies (I2AT) provides cutting-edge services to industry across the region. [http://www.cavs.msstate.edu/]
Simulation of Autonomous Off-Road Driving at CAVS: CAVS has developed the MSU Autonomous Vehicle Simulator (MAVS), an open-source software library for simulating the sensors, environment, and vehicle dynamics of autonomous ground vehicles. MAVS was created to provide real-time, physics-based simulation capability in a modular, customizable architecture that can be integrated with a variety of other systems and simulators like the Robotic Operating System (ROS). MAVS features a C++ API as well as a Python interface to the API that allows for rapid development of simulated experiments. MAVS can automatically create off-road scenes and generate semantically labeled lidar point clouds and camera images. MAVS is free and open source for non-commercial use, including academic and federal government research.
Library
The library at MSU maintains paid subscriptions to print and online journals, and professional society digital libraries (e.g., IEEE Xplore), which provide access to conference proceedings. The library also has a dedicated librarian for the College of Engineering. These librarians provide extensive support to faculty and students, including locating and securing print or digital resources and conducting training workshops. REU students will have access to the library and librarians for conducting literature searches. Conveniently, it is located directly across the street from the ECE building.